
 Deutsch
Deutsch









Permanentmagnet-Synchronmotor
Der Hauptunterschied zwischen einem Permanentmagnet-Synchronmotor (PMSM) und ein Induktionsmotor befindet sich im Rotor. Studien 1. zeigen, dass das pmsm hat ein Effizienz von ungefähr 2% mehr als ein hocheffizientes (IE3) Induktionselektromotor, vorausgesetzt, der Stator hat das gleiche Design und das gleiche variables Frequenzlaufwerk wird für die Kontrolle verwendet. In diesem Fall haben Dauermagnet-synchrone Elektromotoren im Vergleich zu anderen Elektromotoren die beste Leistung: Macht / Volumen, Drehmoment / Trägheit usw.
ein dauerhafter Magnetsynchronmotor, wie jeder rotierender elektrischer Motor., besteht aus einem Rotor und einem Stator. Der Stator ist das feste Bestandteil. Der Rotor ist das rotierende Typ.
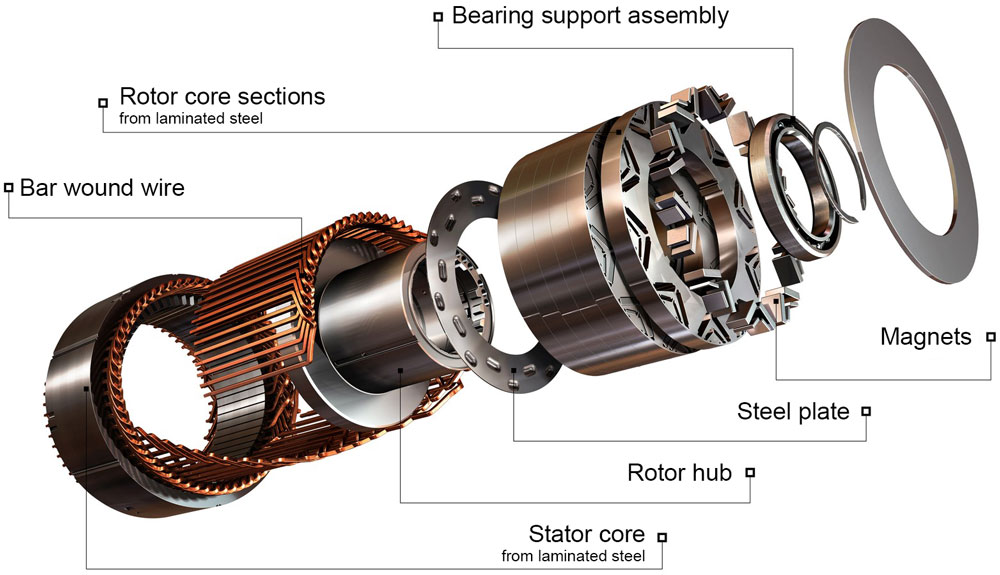
Typischerweise befindet sich der Rotor innerhalb des Stators des Elektromotors, es gibt auch Strukturen mit einem externen Rotor - innen aus elektrisch Motoren.
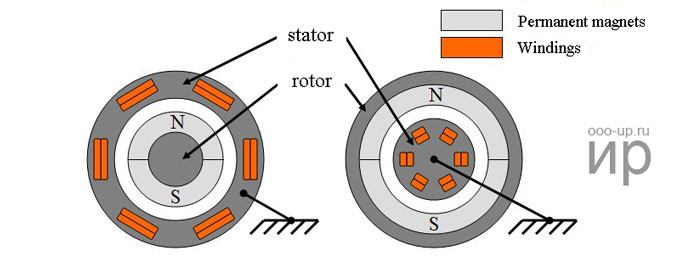
Das Rotorbesteht aus dauerhaften Magneten. Materialien mit hoher Zwangskraft werden als permanente Magnete verwendet.
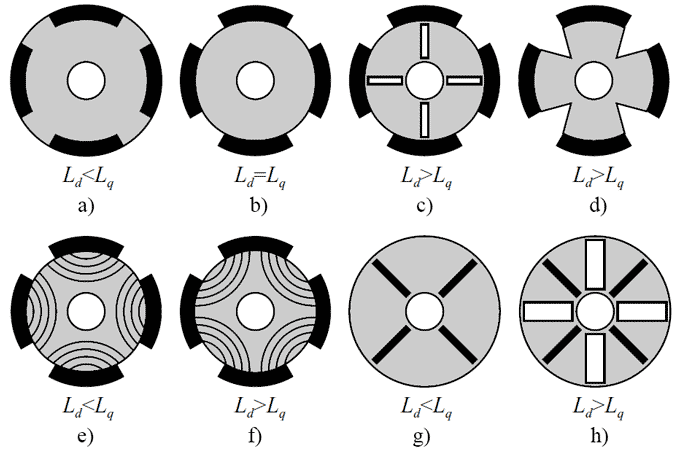
ein Elektromotor mit Nicht-hervorstechender Pole Rotor hat eine gleiche Direkt- und Quadraturinduktivität L D. = L. q , während Bei einem Elektromotor mit einem hervorragenden Polrotor ist die Quadraturinduktivität nicht dem direkten L q ≠ L. D. .
Das Statorbesteht aus einem äußeren Rahmen und einem Kern mit Wicklungen. Das häufigste Design mit Zwei- und Dreiphasen Wicklung.
verteiltRufen Sie eine solche Wicklung an, in der die Anzahl der Slots pro Pole und Phase q = 2, 3, ...., k.
konzentriert So ein Wickeln genannt, in dem die Anzahl der Slots pro Pole und Phase q = 1. In diesem Fall werden die Schlitze gleichmäßig um den Umfang des Tators angeordnet. Die beiden Wickelungen, die die Wicklung bilden, können sowohl in Reihe als auch in parallel angeschlossen werden. Der Hauptnachteil solcher Wicklungen ist die Unmöglichkeit, auf die Form der EMF-Kurve zu beeinflussen [2] .
Die Form der EMF-Kurve in dem Leiter wird durch die Verteilungskurve der magnetischen Induktion in dem Spalt um den Stator um den Stator bestimmt.
Es ist bekannt, dass die magnetische Induktion in dem Spalt unter dem ansteigenden Pol des Rotors eine trapezförmige Form hat. Der in dem Leiter induzierte EMF hat das gleiche Form. WENN Es ist notwendig, ein sinusförmiges EMF zu erstellen, dann werden die Polspitzen so eine Form gegeben, dass die Induktionsverteilungskurve in der Nähe von sinusoidal sein. Dieses wird durch die Fasen der Polspitzen des Rotors erleichtert [2] .
Das Prinzip des Betriebs eines Synchronmotors basiert auf der Wechselwirkung des rotierenden Magnetfelds des Stators und des konstanten Magnetfelds des Rotors. Das Konzept des rotierenden Magnetfelds des Stators eines Synchronmotors ist der gleiche wie das von a Dreiphasen Induktionsmotor .
Der Betriebsprinzip eines Synchronmotors basiert auf der Wechselwirkung der rotierendes magnetisches Felddes Stators und des konstanten Magnetfelds des Rotors.
Das magnetische Feld des Rotors, der mit dem synchronen Wechselstrom der Statorwicklungen interagiert, entsprechend den Ampere Gesetz, schafft. Drehmoment, den Rotor zwingen, sich zu drehen ( Mehr ).
Permanentmagnete auf dem Rotor der PMSM Erstellen Sie ein konstantes magnetisches Feld. Bei einer synchronen Drehzahl des Rotors mit dem Statorfeld verriegeln sich die Rotorpole mit dem rotierenden Magnetfeld des Stators. In dieser Hinsicht das pmsm kann nicht Start selbst Wann Es ist direkt mit der Drei-Phase Aktuelles Netzwerk (aktuell Häufigkeit im Stromnetz 50Hz).
Ein Permanentmagnet-Synchronmotor erfordert beispielsweise ein Steuerungssystem, beispielsweise a variables Frequenzlaufwerkoder ein Servo Antrieb. Es gibt eine große Anzahl von Steuertechniken implementierte Steuerungssysteme. Die Wahl der optimalen Steuermethode hängt hauptsächlich von der Aufgabe ab, die vor dem elektrischen Antrieb gelegt wird. Die Hauptmethoden zum Steuern eines Dauermagnetsynchronmotors sind in der Tabelle unten gezeigt.
| Steuerung | Vorteile | Nachteile | |||
|---|---|---|---|---|---|
| Skalar | Einfache Steuerungsschema. | Kontrolle ist nicht optimal, nicht für Aufgaben geeignet Die variable Last, der Kontrollverlust ist möglich | |||
| Mit Positionssensor. | Glatte und präzise Einstellung der Rotorposition und der Motordrehzahl, großer Steuerungsbereich | erfordert einen Rotor-Positionssensor und leistungsstark Mikrocontroller Innerhalb des Kontrollsystems | |||
| Ohne Positionssensor | Kein Rotor-Positionssensor erforderlich. Glatte und präzise Einstellung der Rotorposition und der Motordrehzahl, großer Steuerungsbereich, jedoch weniger als mit Positionssensor. | Sensorless Feldorientierte Kontrolle über voller Geschwindigkeitsbereich. ist nur möglich für pmsm Mit einem ansteigenden Polrotor ist ein leistungsstarkes Steuerungssystem erforderlich | |||
| direkte Drehmomentkontrolle. | Einfache Steuerkreis, gute dynamische Leistung, weiten Steuerungsbereich, kein Rotor-Positionssensor erforderlich | Hohe Drehmoment- und Stromwelligkeit | |||
| offene Schleife | Einfache Steuerungsschema. | Kontrolle ist nicht optimal, nicht für Aufgaben geeignet Die variable Last, der Kontrollverlust ist möglich | |||
| Mit Positionssensor (Halle Sensoren) | Einfache Steuerungsschema. | Hall-Sensoren erforderlich. Es gibt Drehmoment Wellen. Es ist zur Kontrolle von pmsm mit trapezförmigem Rücken EMF, wann Controlling PMSM Mit sinusförmigem Rücken EMF ist das durchschnittliche Drehmoment mit 5% niedriger. | |||
| Ohne Sensor | leistungsfähigeres Steuerungssystem erforderlich | Nicht geeignet für niedrige Geschwindigkeit Betrieb. Es gibt Drehmoment Wellen. Es ist zur Kontrolle von pmsm mit trapezförmigem Rücken EMF, wann Controlling PMSM Mit sinusförmigem Rücken EMF ist das durchschnittliche Drehmoment mit 5% niedriger. | |||
Zu Lösen von einfachen Aufgaben werden in der Regel trapezförmige Steuerung mit Hall-Sensoren (für Beispiel, Computer-Fans) verwendet. Zu Lösen Sie Probleme, die maximale Leistung vom elektrischen Antrieb erfordern, Feldorientiert Kontrolle ist normalerweise ausgewählt.
Eine der einfachsten Methoden zur Steuerung eines Permanentmagnet-Synchronmotors ist - trapezförmig Steuerung. Die Trapezkontrolle dient zur Steuerung des pmsm mit trapezförmig zurück EMF. Mit dieser Methode können Sie gleichzeitig auch den pmsm mit einem sinusförmigen Rücken EMF, dann wird das durchschnittliche Drehmoment des elektrischen Antriebs jedoch um 5% niedriger und die Drehmomentkräuben sind 14% des Maximums Wert. Es gibt eine trapezförmige Kontrolle ohne Rückmeldung und mit Feedback an der Position des Rotors.
Das Open Loop-Steuerung (ohne Feedback) ist nicht optimal und kann zur Veröffentlichung des pmsm Außerhalb des Synchronismus, d. H. Zum Verlust der Steuerbarkeit.
als Rotor-Positionssensor für Dreiphasen Trapezkontrolle, drei in einem Elektromotor eingebaute Hall-Sensoren werden üblicherweise eingesetzt, wodurch der Winkel mit einer Genauigkeit von ± 30 Grad. Mit dieser Steuerung dauert der Statorstromvektor nur sechs Positionen für eine elektrische Zeit, wodurch das Welligkeitsdrehmoment an der -Ausgabe vorhanden ist.

Fieldorientiert Kontrolle (foc) ermöglicht es Ihnen, die Geschwindigkeit sanft, genau und unabhängig zu steuern Drehmomentvon einem bürstenlos Motor. Für Der Betrieb des feldorientierten Steuerungsalgorithmus ist notwendig, um die Position des Rotors des bürstenlos zu kennen Motor.

Seit Die 1970er Jahre Sensorloser Vektor-Steuerungsmethoden für bürstenlos AC. Motorenbegann sich dank der schnellen Entwicklung von Mikroprozessoren entwickelt zu werden. Der erste sensorloser Methoden zur Schätzung des Winkels basierten auf der Eigenschaft des Elektromotors, um zurück EMF während Rotation. Die Motorrückseite EMF enthält Informationen über die Position des Rotors, daher durch Berechnen des Werts des Rücken-EMF im stationären Koordinatensystem, können Sie die Position des Rotors berechnen. Aber wann Der Rotor dreht sich nicht, die Rücken-EMF ist abwesend, und bei niedriger Geschwindigkeit hat die Rücken-EMF eine kleine Amplitude, die schwierig ist, aus Rauschen zu unterscheiden, daher ist dieses Verfahren nicht zum Bestimmen der Position des Motorrotors bei niedriger Geschwindigkeit geeignet .

derzeit sensorloser fieldorientiert Kontrolle von pmsm Im vollständigen Geschwindigkeitsbereich ist nur für Motoren mit hervorstechendem Pole-Rotor möglich.
Für Anfragen zu unseren Produkten oder Pricelist, bitte gehen Sie uns an und wir werden innerhalb von 24 Uhr morgens in Kontakt treten.





 Ruf an bei :
Ruf an bei :
Telefon : +8613860661520
 Schreiben Sie uns eine E-Mail :
Schreiben Sie uns eine E-Mail :
Email : ivy@tech-zy.com
 Adresse :
Adresse :
Floor 16 Building#3, No.136. Kuiqi Road, Mawei District, Fuzhou City, Fujian Province, China
© Urheberrechte ©: 2026 Fujian ZY Electric & Machinery Technology Co.,Ltd Alle Rechte vorbehalten.

IPv6 Netzwerk unterstützt






